Кроме того, создан макет радиовысотомера на основе радара MIMO, разработан макет БПЛА для проведения испытаний в нескольких режимах, а также тестовые версии полетного контроллера, которые установлены в беспилотные летательные аппараты (БПЛА).
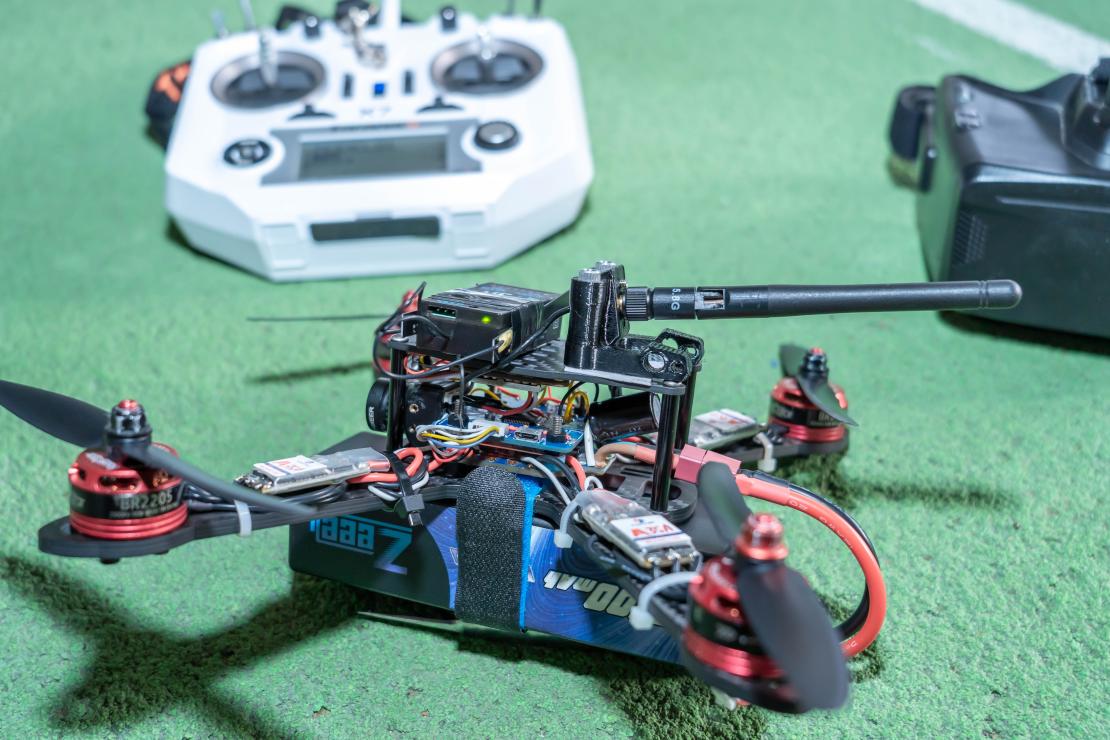
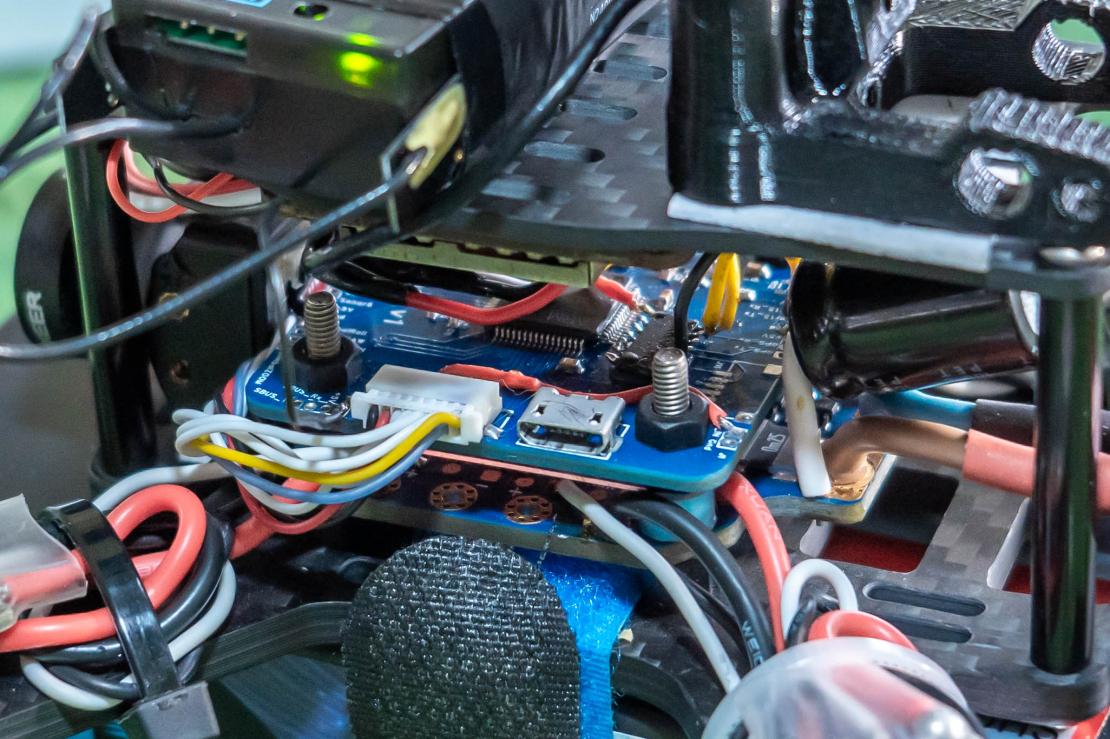
Он добавил, что, по сути, полетный контроллер представляет собой плату, которая управляет полетом БПЛА. Она включает в себя ряд жизненно важных датчиков: барометр, акселерометр, гироскоп, а также инерциальную и глобальную навигационную систему. Это сердце любого беспилотника. Внутрь процессора, установленного на контроллере, загружается операционная система, в которой происходит обработка информации от датчиков.
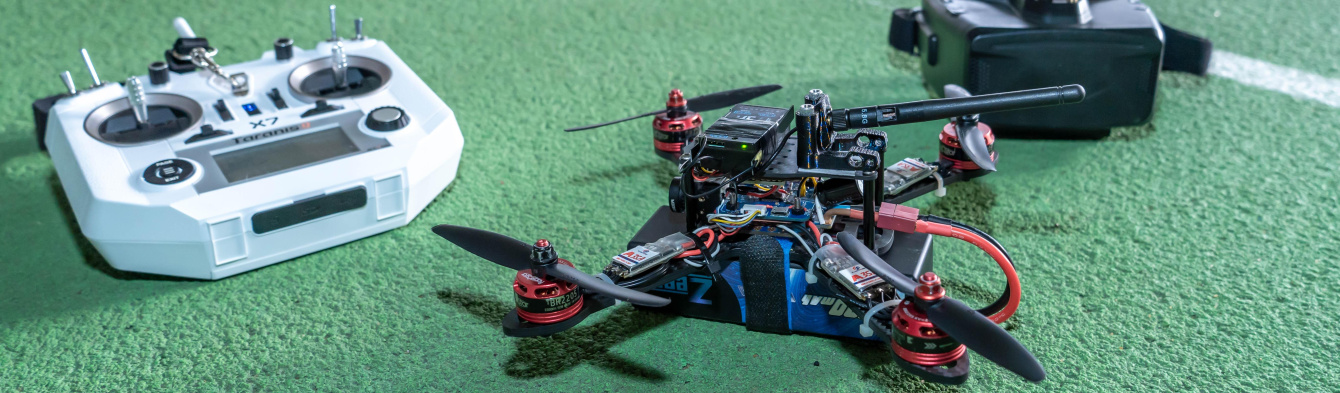
Итераций было много, контроллер эволюционировал. Из большой неуклюжей штуки он в итоге превратился в образец, который имеет вполне промышленный вид. Наша лаборатория располагает уже несколькими полетными контроллерами. Мы испытывали их в Ростовской области и в Подмосковье. Были продемонстрированы хорошие результаты. Важно, что аппаратами, на которых испытывают этот полетный контроллер и его алгоритмы, управляют студенты ДГТУ, обучающиеся по направлениям «Радиотехника» и «Вертолетостроение». Студенты Михаил Жебеленко, Дмитрий Чижевский, Борис Кузнецов, Олег Новиков, Дмитрий Улевский сами собирают БПЛА, сами их при необходимости модернизируют, ремонтируют и потом совершают облеты.
От этих алгоритмов очень многое зависит. Разрабатываемый в нашей лаборатории контроллер можно будет устанавливать и на отечественные БПЛА, и на беспилотники зарубежного производства. В этом его рыночное преимущество. Наши ученые под руководством заведующего лабораторией НИЛ ТБТ Сергея Лазаренко эту задачу решили и совершенствуют действие алгоритмов в процессе испытаний.
По его словам, сейчас полетный контроллер собран на импортных комплектующих. Но ученые ДГТУ поставили перед собой амбициозную задачу – разработать контроллер полностью на отечественных комплектующих.
На данный момент из российского в нем – плата и наш труд. Но у нас уже есть понимание, как это сделать. И в следующем году выйдем на испытания полностью нашего, российского контроллера. Компоненты отечественная промышленность уже начала поставлять на рынок.
Лаборатория ТБТ создана в ДГТУ в октябре 2022 года. Целью ее деятельности является создание интеллектуальных систем, направленных на сокращение времени разработки и стоимости информационно-управляющих систем беспилотных летательных аппаратов с оригинальными тактико-техническими характеристиками, обеспечивающими безопасную и эффективную эксплуатацию техники.
Исследования посвящены научной проблеме решения экстремальных задач нелинейных систем, прикладная значимость которых определяется необходимостью разработки аппаратно-программного комплекса автономной навигации.
Игорь Голота, управление информационной политики
isdstu@mail.ru