По словам лидера проекта, разработчика встраиваемого ПО, студента 3 курса Института опережающих технологий «Школа Икс» ДГТУ Максима Нарубина, главным отличием и преимуществом этой разработки является интеграция систем в одно комплексное решение, обеспечивающее полный контроль над виноградным полем, работа без постоянного надзора человека, учет потребности каждой лозы.
Цель проекта – разработать и протестировать мобильную колесную платформу, создающую цифровую тень поля, с модулем точечного опрыскивания для виноградных кустов, обеспечив контроль здоровья винограда и эффективное поддержание роста кустов в течение круглого года. Опрыскивание винограда необходимо проводить от 16 до 20 раз в год для защиты растения от таких болезней, как милдью, оидиум, серая гниль и другие. Эти болезни могут сокращать урожай винограда до 30% в год, что существенно влияет на прибыль предприятия.
Он рассказал, что в 2019-2024 годах в пяти ключевых регионах (Крыму, Краснодарском крае, Ставрополье, Ростовской области и Дагестане) зарегистрировано 773 новых предприятия по производству винограда при 570 закрытых (+203), площади выращивания винограда в России с 2015 года к 2025 году выросли на 25% (с 88,9 тыс. га до 110,2 тыс. га).
Для борьбы с болезнями винограда есть два основных метода: традиционное опрыскивание, когда химикаты распыляются на всю площадь виноградника, и локальное (точечное) опрыскивание, когда обработка фокусируется на конкретных пораженных кустах и прилегающих зонах. Традиционный метод имеет серьезные недостатки: воздействие на здоровые растения – химикаты попадают на здоровые кусты, что может приводить к ожогам листьев и гроздей, химикаты расходуются в огромных, часто неоправданных объемах, увеличивая себестоимость и нанося вред окружающей среде. Локальный метод, несмотря на экономию растворов (до 50-70%) и снижение риска фитотоксичности, сталкивается с фундаментальными проблемами организации и контроля.
При этом критически не хватает эффективных инструментов для точного учета – где именно нужно опрыскивать, в каком объеме, какие кусты уже обработаны, а какие требуют внимания, каковы результаты предыдущих обработок. Учет ведется фрагментарно или вообще отсутствует. За неимением возможности постоянно контролировать и фиксировать состояние всех кустов в единой, актуальной и пространственно привязанной системе, происходит пропуск зараженных зон и, как следствие, потери урожая. При этом имеет место отток кадров из отрасли.
Команда разработчиков, в которую также входят обучающиеся Института опережающих технологий «Школа Икс» – конструктор, разработчик мобильной платформы Николай Костромской и электронщик, разработчик аппаратной части робота Ольга Калюжная, предлагает вариант решения этих проблем.
Ядро системы – цифровая тень виноградника. Робот фиксирует геоданные, состояние каждого куста и историю обработок. Это позволяет автоматически планировать маршруты, генерировать аналитические отчеты, прогнозировать риски заболеваний.
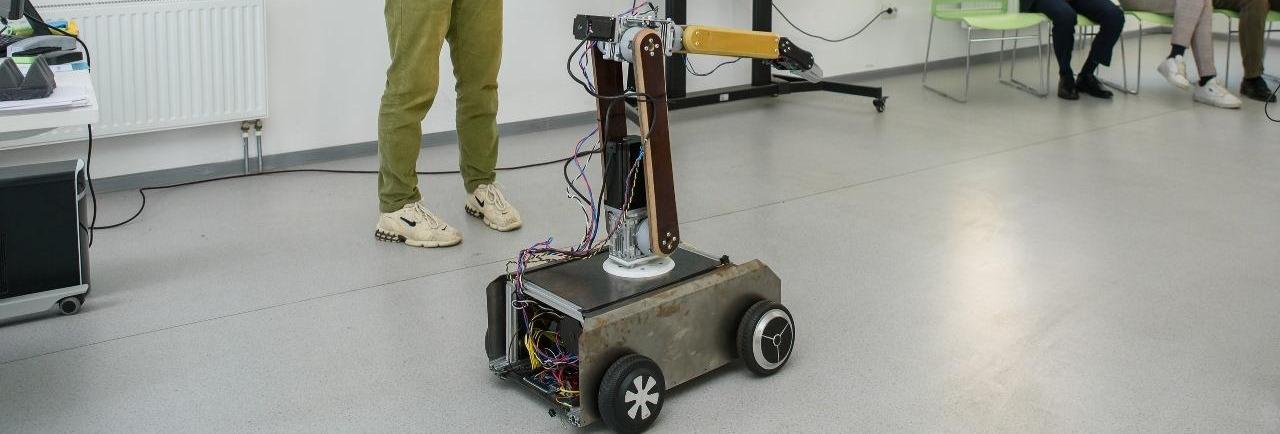
Робототехническая система состоит из мобильной платформы, модуля для точечного опрыскивания с баком и сервера, хранящего на себе цифровую модель поля. На мобильной платформе находится система компьютерного зрения, состоящая из RGB и Depth камер для анализа состояния растений.
У робота настраивают связь с локальным сервером предприятия, где будет храниться цифровая тень и проводиться анализ поля. Пользователь запускает робота в ручном режиме управления для построения пути от места подзарядки до выхода в поле (в этот момент робот строит свою карту, по которой в дальнейшем сможет перемещаться самостоятельно). Аккумулятор робота является съемным для возможности его зарядки в любом подходящем для этого месте.
Цифровая тень представляет из себя визуализированную карту его поля с отмеченными местами роста винограда, количеством растений и местоположением робота, в отдельном окне выводится информация о заболевших кустах, кустах на стадии возможного заболевания и здоровых растениях.
Расположение колесной части платформы дает возможность устройству проходить сверху и по бокам куста. П-образная форма робота позволяет ему избежать влияния ветра на распыление химикатов, а также расположить камеры и датчики таким образом, что можно осмотреть куст с разных сторон и получить более точную и детализированную информацию о нем.
Использование такого помощника позволит хозяйствам экономить на химикатах и восполнять дефицит кадров, исключать «пропущенные» зоны в процессе ухода за растениями.
Робот перемещается по винограднику по навигационным технологиям (GPS, датчики). Он анализирует состояние почвы, здоровье растений и факторы окружающей среды. На основе этих данных робот выполняет целевые действия, например, подрезает лозы, удаляет отмершие ветки, производит точечное опрыскивание, исключающее ожоги на листьях и гроздях культуры.
Иными словами, цифровая тень становится единым источником правды для агронома, полностью устраняя проблему ручного учета и «забытых» кустов. Она позволяет анализировать эффективность мероприятий в динамике и прогнозировать риски.
Робот подходит для участков от 1 до 20+ га. Проект разрабатывается для малых и средних хозяйств с гибкой моделью аренды. В перспективе к уже имеющимся добавятся модули для полива, обрезки и контроля микроклимата. Технология может быть адаптирована и для других культур.
Разработчики уверены, что их платформа будет доступна даже для небольших сельскохозяйственных предприятий.
Проект реализуется в рамках программы «Приоритет 2030».
Игорь Голота, управление информационной политики
isdstu@mail.ru